Evangelos Boukas
Heavy Duty Planetary Rover (HDRP)
During my year-long appointment at ESA's ESTEC I customly designed and constructed, along with my colleagues at the ARL, the HDPR rover in the context of my Ph.D. and in order to fulfil ARL's needs for long range field tests. The rover was built on top of the HDPC, which was a strong but sensorless and tethered chassis, that was delivered to ESA by ETH in 2011. The rover has been employed in a long range field test (>1km), in order to assess the problem of Global Localization.
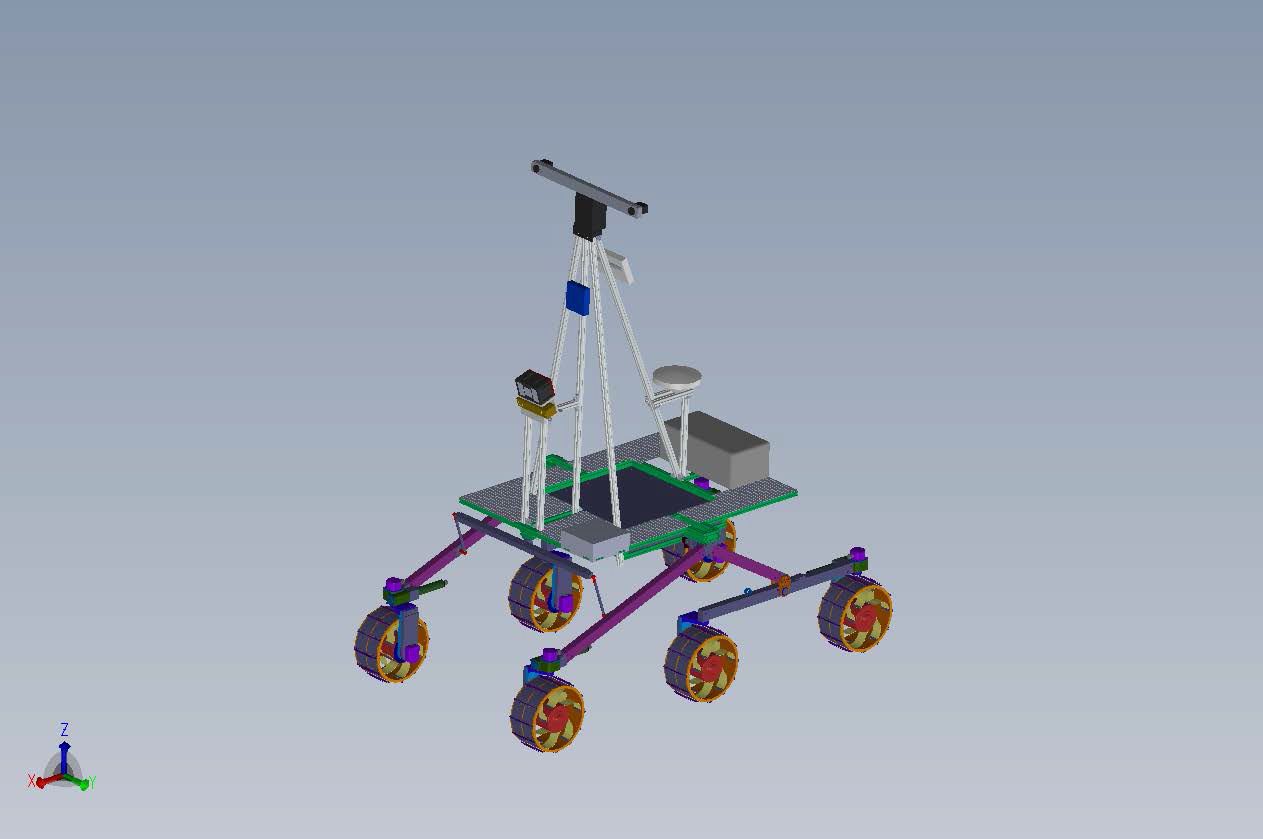
The CAD model of the HDPR robot.
The HDPR rover deployed on a Mars Yard located near ESA ESTEC.
The rover comprises several sensors. The exteroceptive sensors are: i) LocCam Stereo Camera (PointGrey Bumblebee 2), ii) PanCamm Stereo Camera (PointGrey Grasshopper 2), iii) MESA SR4500 Time of Flight, iv) Velodyne LiDAR (VLP-16). The proprioceptive ones are: i) Trimble GNSS receiver (BD970), ii) Inertial Measurement Unit (Sensoror STIM300), iii) Shaft Encoders and Potentiometers. The camera system of the robot is based on the ExoMars rover, by placing the cameras in the same configuration (height and tilt) and by creating an analog for the “Wide Angle Camera” (WAC) on the ExoMars Pancam. This robot is based on the "Robot Construction Kit" (ROCK).
Mobile Autonomous riGGed Indoors Exploratory robot (MAGGIE)
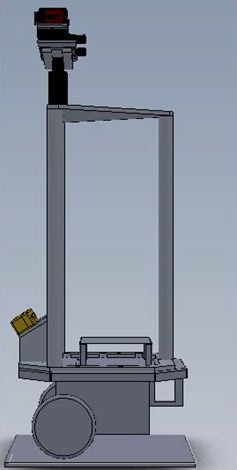
The CAD model of MAGGIE robot.
Overview and details of the MAGGIE robot.
MAGGIE is a robot for indoors activities that has been designed by me and Dr. Ioannis Kostavelis. It bears two stereo pairs, a Structured-light 3D sensor (Kinect 1), an xsens IMU and an Xilinx Field Programmable Gate Array (FPGA). It has been used for several experiments two of which stand out: i) The Robot Guided Croud Evacuation experiment (see the corresponding publication in IEEE T-ASE) and, ii) the acquisition of a short range dataset for the ESA funded SPARTAN project. This robot is based on the "Robot Operating System" (ROS).
Temporary Robots for Diploma Theses based on Videre ERA-Mobi
I have built several custom robots which were based on the Videre Design ERA-Mobi. Those robots do not exist as separate designs but, rather, as modular systems that are built for a specific project. These robots are usually used by the undergrads I co-supervise in the context of their diploma theses. The noteworthy cases of diploma theses I co-supervised are mentioned here: i) "Human following robot" (employing the Kinect v1) - 2012, ii) "3D object recognition" (employing the Kinect v1) - 2016, iii) "Robot navigation in the dark" (employing the Kinect v2 TOF) - 2016. All these robots are based on the "Robot Operating System" (ROS).